




人工气候室需要控制的参数主要是温度和湿度,而控制难点也在于其对象的滞后性、无准确数学模型以及存在不确定干扰,同时温湿度存在耦合现象。目前国内外对温湿度的控制主要通过开关控制或是单纯的采用PID控制或是模糊控制来实现。显然,开关控制效果非常粗糙,同时会造成设备的频繁启停,降低设备使用寿命;PID控制对于非线性时变、滞后较大的温湿度控制系统来说,鲁棒性不强;而单纯的模糊控制器存在静差,控制精度不够高,同时也很难解决温湿度的耦合问题。综上所述,同时又考虑到相对于温度的变化对湿度的影响,湿度变化对温度的影响可以忽略,因此,本文设计出一种PID搭配模糊PID的控制算法,先对温度进行控制,当温度达到控制要求后再用模糊算法对湿度进行控制,并进行现场调试。
1 控制方案
人工气候室是具有恒温、恒湿、恒CO2、恒光照功能,同时也具备调温、调湿、调CO2、调光照功能的大型实验设备,是生物、遗传、医学、农林业等生产和科研部门的理想实验设备,广泛应用于植物的发芽、育苗、组织细胞和微生物的培养等。它主要由主控制柜、温湿度控制设备、CO2浓度控制设备及光照强度控制设备等组成。
在内蒙古大学生物学院人工气候室控制系统性能要求中,对温度的控制要求最高,要求控制精度在±1℃,其次是对湿度的控制要求,控制精度要求在±5~±10%。同时,为了模拟植物生长环境的周期性特点,系统设有分时段运行控制,不同时段的温湿度设定值不同。因此,人工气候室温湿度控制的主要难点有:
1)温湿度控制对象的非线性时变性、大滞后性等;
2)温度湿度的耦合性;
3)在由一个时段运行结束跳转至下一时段运行时,系统温湿度瞬时误差可能很大,对控制造成很大困扰;
4)对光照、CO2进行控制时的内部干扰和系统本身的外部环境干扰严重。
由理论可知,PID控制能够做到无静差控制,模糊控制抗干扰能力强适应性强,同时响应速度快。根据以上理论同时综合考虑该人工气候室温湿度控制的难点,提出以下控制方案如图1所示,即:
1)相对于温度变化对湿度的影响,湿度变化对温度的影响可忽略,因此先对温度进行控制,直到温度控制满足系统要求再对湿度进行控制,解决温湿度耦合问题;
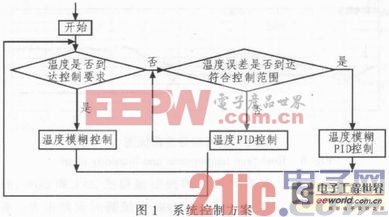
2)湿度控制精度要求不高,但需要克服多种干扰,因此,用模糊控制对湿度进行控制既可以满足要求;
3)温度控制除了涉及精度、干扰等问题,同时还有时段跳转时的平滑快速控制问题,因此用模糊控制与模糊PID控制分时复用的方法对温度进行控制。用模糊控制的快速适应性实现平滑快速的控制,用模糊PID控制实现强抗干扰性的精确控制。
2 控制器设计
2.1 湿度模糊控制器
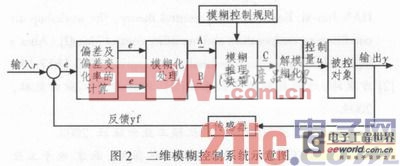
模糊控制是建立在模糊数学的基础上,模仿人的思维方式,总结人的操作经验,并用模糊语言和一系列的模糊条件语句,描述控制策略;然后通过计算机或专用模块实现这些规则,完成控制作用。模糊控制的一个优越性在于它不依赖被控对象的精确数学模型,因此,在工业过程中,对于那些无法获得数学模型或模型粗糙复杂的、非线性的、时变的或是耦合十分严重的系统,模糊控制非常适合。就二维模糊控制,其原理图如图2所示。
湿度模糊控制器的输入为湿度误差eh和湿度误差变化率ehc,输出为湿度控制执行器加湿器的开和关状态。根据系统实际运行环境可知,湿度误差eh和湿度误差变化率ehc的实际论域均为[-30%,30%]。
设eh和ehc的语言变量值取为{NB,NS,Z,PS,PB},模糊论域EH和:EHc均为{-3,-2,-1,0,1,2,3},输出UH是加湿器的开关状态,故语言变量值为{ON,OFF}。EH和EHc的隶属函数均选择三函数,如图3所示。
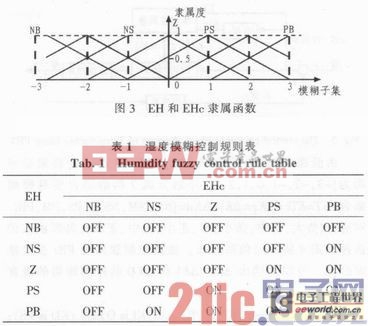
根据人工气候室湿度控制的特性,可以总结出模糊控制规则如表1所示。
2.2 温度模糊-模糊PID复合控制器
温度控制器器结构上分为两部分,模糊控制部分和模糊PID控制部分。
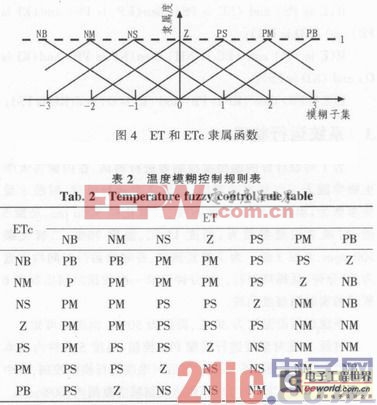
糊控制部分主要用于实现时段跳转时的快速平滑控制,根据内蒙古大学人工气候室的运行特点,其时段跳转时的温度跨度最大不超过10℃。因此温差et和温差变化率etc的基本论域选为[-10℃,10℃]。输入温差ET、温差变化率ETc和输出控制量UT语言变量均取为{NB,NM,NS,Z,PS,PM,PB},模糊论域均取为{-3,-2,-1,0,1,2,3},隶属度函数仍然取三角函数如图4所示。为了做到时段跳转时快速将被控温度控制在设定值±5℃,根据模糊控制器控制特点及现场情况,总结出控制规则如表2所示。
模糊PID控制部分主要实现系统的精确控制,运用模糊控制的强适应性,在线修改PID控制器的参数,使系统能够在各种干扰情况下仍可实现高精度的控制。其控制原理如图5所示。
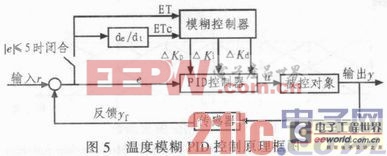
由前面可知,设ET、ETc、△Kp、△Ki和△Kd的模糊论域均为{-3,-2,-1,0,1,2,3},并划分成7档的语言变量模糊集合:ET=ETc= △Kp=△Ki=△Kd={NB,NM,NS,0,PS,PM,PB},对应为{负大,负中,负小,零,正小,正中,正大},隶属函数仍选择如图4所示三角形分布。根据控制原则及PID参数整定原则,可以总结出△KP、△KI和△KD的控制规则的语言描述如下:

3 系统运行状况
为了对设计好的温湿度控制器进行测试,在内蒙古大学生物学院人工气候室的现场,设定2个运行时段,时段1设置参数为:温度25℃、湿度60%、二氧化碳500p pm、光照3级;时段2设置参数为:温度15℃、湿度70%、二氧化碳500 ppm、光照3级。为了便宜测试,各时段运行时间均设置为30分钟,且循环运行。每分钟记录一次数据绘制出如图6所示的实时温湿度曲线。
系统运行前温度为30℃,湿度为50%。由图6可知:
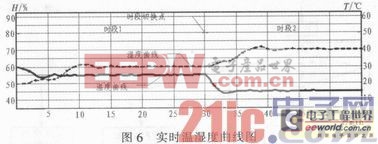
时段1:先对温度进行模糊PID控制,温度5分钟内基本到达控制精度范围(25℃±1)。然后对湿度进行模糊控制,图中显示,湿度快速(大约7分钟)到达控制精度范围内(60%±5)。
时段2:当系统运行到30分钟时,到达时段切换点进入时段2。当前温湿度为时段1的控制温湿度25℃和60%,而时段2的设定温湿度为15℃和70%,系统瞬时误差很大。系统任然先对温度进行模糊控制,使其快速到达控制点15℃左右,然后用模糊PID对其进行精确控制,使其控制在要求精度范围(15℃±1)内。当温度达到控制要求后,对湿度进行模糊控制,同样很快到达控制要求范围(70%±5)内。
4 结论
不难看出,温度的变化对湿度影响明显大于湿度的变化对温度的影响(由图可知湿度变化时温度基本没有波动),因此选择先温控后湿控的解耦方法是行之有效的。系统的响应速度较快(温度5分钟左右达到控制要求,湿度7分钟左右达到控制要求)、超调量小(温度小于2 ℃,湿度小于10%)、控制精度高(温度±1℃,湿度±5%),同时在时段切换点能做到快速平滑的控制要求。结合了模糊控制和PID控制的优点又避免了二者的不足,两者相结合,使人工气候室的温湿度控制效果达到最佳。










